






El extractor electrónico WLB-10KN adopta un sistema de servocontrol, puede realizar una carga de desplazamiento uniforme y una carga de fuerza uniforme en dos modos de carga, alta eficiencia y buena estabilidad.
1. Uso principal y ámbito de aplicación
El extractor electrónico WLB-10KN adopta un sistema de servocontrol, puede realizar una carga de desplazamiento uniforme y una carga de fuerza uniforme en dos modos de carga, alta eficiencia y buena estabilidad. Con la función de sensor dual, el rango de medición es más amplio, la precisión es mayor y el uso es más flexible y conveniente. Control de pantalla táctil, la interfaz de operación hombre-máquina es amigable. El instrumento de dibujo está equipado con límite de recorrido y función de protección contra sobrecarga de valor de fuerza positiva y negativa, lo que puede prevenir daños al equipo causados por un mal funcionamiento.
Es adecuado para pruebas de resistencia a la tracción y unión de morteros mixtos secos, materiales aislantes, adhesivos cerámicos para paredes y pisos, pinturas de construcción laminadas y masillas utilizadas para la construcción de paredes exteriores. Cumple con la prueba de resistencia de unión de diversos materiales de construcción estipulada por JC/T547-2005, GB/T9779-2005, JG/T157-2004.
Características principales:
1) Control de pantalla táctil, interfaz fácil de usar.
2) Servoaccionamiento, carga de desplazamiento uniforme continuo y carga de fuerza uniforme.
3) Con la función de sensor dual, la configuración estándar es un sensor.
4) Función de elevación rápida y retorno automático con una sola tecla cuando no hay carga.
5) Función de protección contra sobrecarga del límite de recorrido y valor de fuerza positiva y negativa.
6) Posicionamiento rápido en dirección X-Y, especialmente adecuado para la detección de múltiples muestras en una placa de prueba.
7) Equipado con una abrazadera de un solo punto, conveniente para pruebas de una sola muestra.
8) Cabezal de tarjeta en T articulado para facilitar el posicionamiento y carga de muestras.
9) Prensa móvil para evitar la flexión y deformación del material de prueba. (no estándar)
2. Principales indicadores técnicos
1) Fuerza experimental máxima: 10000N
2) Resolución de carga: 0,1N
3) Rango de detección efectivo: 1%-100% de la fuerza experimental máxima
4) Precisión de medición de carga: dentro de ±0,5% del valor indicado
5) Método de dibujo: control del valor de la fuerza, control de desplazamiento y otros métodos de control
6) Rango de velocidad de dibujo: 0,1 mm-300 mm/min
7) Rango de ancho de la muestra: 70-500 mm
8) Espesor máximo de la muestra: 50 mm
9) Carrera máxima del cabezal de prueba: 100 mm
3. Condiciones del ambiente de trabajo
3.1 Dentro del rango de temperatura ambiente de 100 °C a 350 °C, la humedad relativa no supera el 80 %;
3.2 Instalarlo correctamente sobre una base sólida o banco de trabajo con una nivelación de 0,2/1000;
3.3 En un entorno sin vibraciones, medios corrosivos y fuertes interferencias de campos electromagnéticos;
3.4 El rango de fluctuación del voltaje de la fuente de alimentación no debe exceder el ±10% del voltaje nominal.
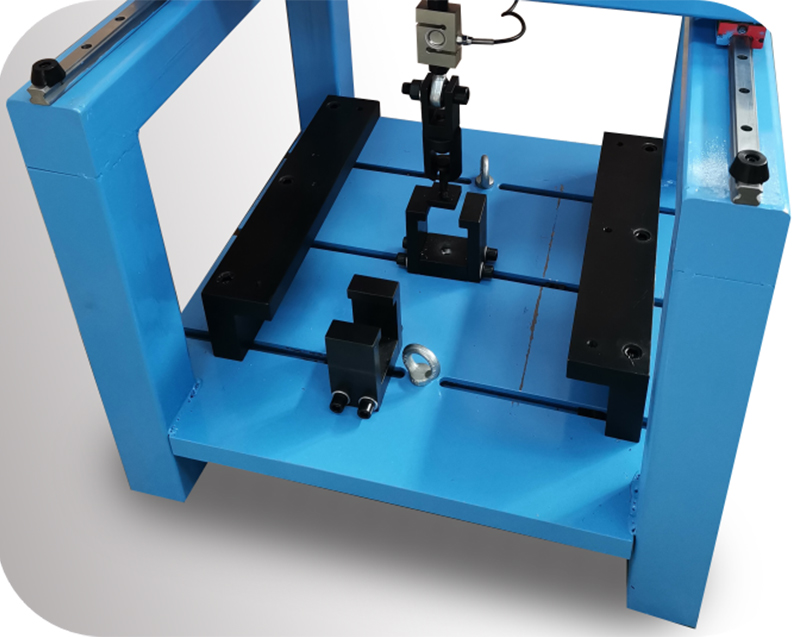
4. Estructura principal
4.1 Conexión de fuentes de alimentación
Como se muestra en la figura, inserte la fuente de alimentación aleatoria en el puerto de alimentación, encienda el botón de encendido frontal y el cable del sensor estará conectado antes de la entrega.

4.2 Ajuste de la posición experimental
Como se muestra en la figura anterior, según la cantidad de bloques de prueba, puede instalar un dispositivo de tracción de un solo punto (al azar con 10 piezas), fijar la posición del dispositivo y luego ajustar manualmente la posición del cabezal de tracción. , prueba, el mandril de tracción es esférico universal, se puede alinear automáticamente y es adecuado para varias posiciones de colocación.
Hay un botón [interruptor de encendido] en el extremo derecho del dispositivo para encender o apagar el dispositivo y la placa de cubierta de alimentación externa roja [interruptor de parada de emergencia], verde [indicador de encendido].
Después de apagar el host, gire el botón [interruptor de encendido], el sistema se enciende y la luz verde [indicador de encendido] se enciende. El dispositivo puede funcionar.
En caso de emergencia, presione el [interruptor de parada de emergencia] rojo para cortar el suministro de energía del host.
5. Instalación y ajuste
5.1 Saque el equipo del paquete y verifique si hubo alguna colisión o daño durante el transporte.
5.2 Colocar el equipo sobre una plataforma sólida o de cemento, y ajustar el nivel para que quede en posición horizontal (nivelación 0,2/1000);
5.3 El sistema de suministro de energía será de 220VAC±10%/50Hz y deberá contar con medidas confiables de puesta a tierra.
6. Uso y funcionamiento
6.1 Preparativos:
6.1.1 Conecte todos los cables del dispositivo correctamente y luego enciéndalo.
6.1.2 Precalentar 5 min;
6.1.3 Borre la ventana de visualización de fuerza de prueba a cero.
6.2 Para muestras de diferentes especificaciones, reemplace diferentes accesorios.
6.3 La introducción y descripción de cada botón de operación se muestran en la pantalla del dispositivo
Diagrama de interfaz de operación (como sigue):

6.3.1 Funciones de la tecla Face:
Pantalla de cristal líquido: muestra valor de fuerza, pico, desplazamiento, velocidad, indicación, curva de prueba, etc.
La pantalla LCD es una pantalla táctil y todas las funciones de la prueba se pueden completar haciendo clic en el texto o la imagen en la pantalla LCD.
6.3.2 Detalles:
A continuación se detalla la visualización y la función de cada pantalla, intercaladas con el uso de botones.

Esta es la pantalla a la que se ingresa directamente después del inicio, haga clic en la pantalla o haga clic en cualquier tecla. Se muestra la siguiente pantalla, como se muestra en la Figura 2:

En la Figura 2, hay un * antes de "prueba de tracción", lo que indica que el método de prueba seleccionado actualmente es una prueba de tracción.
Al hacer clic en cualquier línea de la pantalla, se indica que se ha seleccionado el método de prueba correspondiente. La tecla
Aquí se supone que está seleccionada "prueba de tracción", haga clic en Aceptar en la pantalla o presione la tecla

En la imagen que se muestra en la Figura 3, haga clic en "Prueba" o presione la tecla

En la Figura 4, haga clic en "acelerar" y "reducir velocidad" para cambiar la velocidad, y los botones
Vuelva a la Figura 3, haga clic en Configuración en la esquina superior izquierda de la pantalla o presione

En la Figura 5, haga clic en "Selección del método de prueba" para cambiar a la pantalla como se muestra en la Figura 2.
Vuelva a la Figura 5, haga clic en "Calibración del sistema", solicite ingresar la contraseña, como se muestra en la Figura 6:

Ingrese la contraseña 111 y haga clic en Aceptar para ingresar Figura 7:
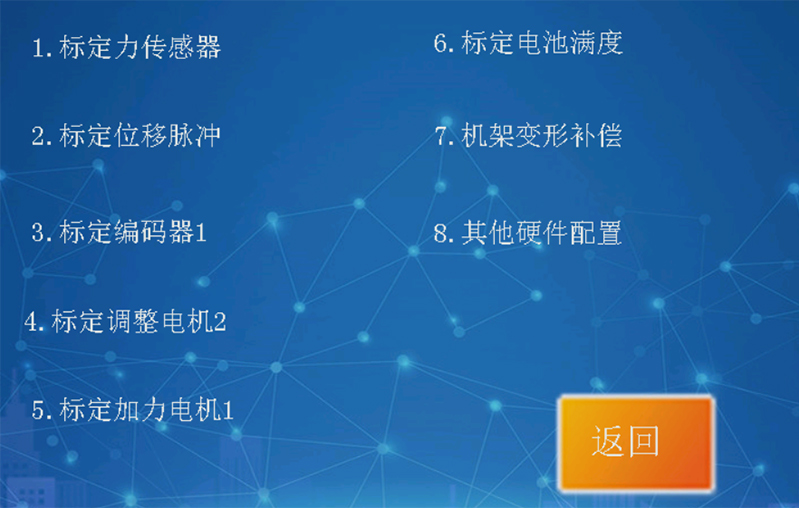
Tres parámetros: fuerza, desplazamiento y velocidad deben calibrarse antes de su uso; de lo contrario, serán inexactos.
Entre estos tres parámetros, la secuencia de calibración debe ser primero el desplazamiento, luego la velocidad y finalmente la fuerza.
Dos conceptos: desplazamiento y deformación.
El desplazamiento es la distancia que se mueve el haz de prueba.
La deformación es la deformación de la muestra después de ser estresada, y la deformación se puede medir mediante un extensómetro especial o por desplazamiento. Tomando como ejemplo la espuma rígida comprimida, durante el movimiento descendente del penetrador superior, el desplazamiento continúa aumentando y la deformación es cero antes del contacto con la muestra; después del contacto con la muestra, la deformación aumenta y el desplazamiento también aumenta, y el desplazamiento total menos la carrera vacía antes del contacto con la muestra es la deformación. Este es el principio básico de medir la deformación por desplazamiento.
El tablero de control principal admite tres canales de entrada de pulsos, a saber, pulso 0, pulso 1, pulso 2.
El pulso 0 está conectado al pulso de salida del motor en la placa de circuito, para el motor paso a paso o el servomotor de CA, hay un pulso de accionamiento del motor, el pulso 0 cuenta, el pulso 0 refleja el número de pasos de la rotación del motor, el La rotación del motor impulsa el movimiento del haz, el pulso 0 es proporcional al desplazamiento.
El pulso 1 y el pulso 2 son interfaces de codificador ortogonales completas con entradas de pines externos.
Haga clic en "Pulso de desplazamiento de calibración" para mostrar la Figura 8:

Para medir el desplazamiento se necesita una regla o un indicador de cuadrante.
Ingrese cualquier velocidad (cuando la velocidad no es precisa y es innecesaria), el motor sube o baja para arrancarlo, tome la regla como estándar, deje que el haz se mueva una cierta distancia, como 20 mm, vea la medida número de pulso, asumiendo 2400, luego la longitud estándar se completa con 20, el número de pulso correspondiente se completa con 2400, haga clic en guardar y se completa la calibración de desplazamiento.
La calibración del codificador 1 y el codificador 2 es similar y no se describirá nuevamente.
Haga clic en "Velocidad de calibración" en la Figura 7 para mostrar como se muestra en la Figura 9:
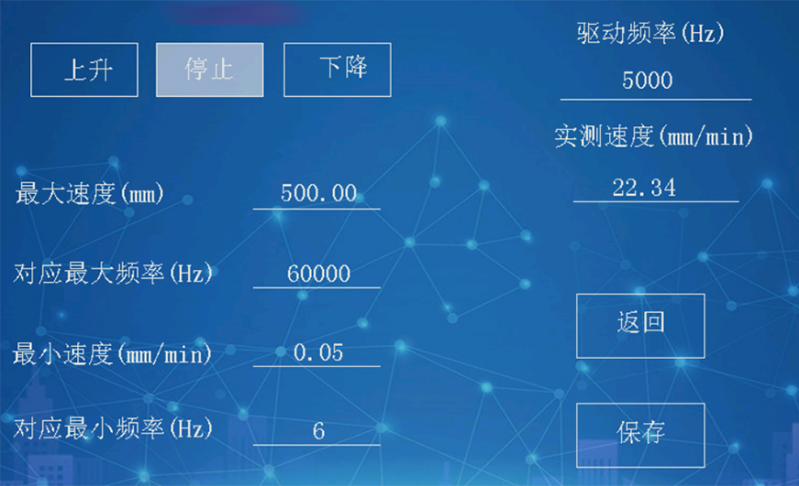
En la Figura 9, ingrese cualquier frecuencia de accionamiento, como 10000, haga clic hacia arriba o hacia abajo y verifique la velocidad medida tres segundos después. Si la velocidad medida es menor que la velocidad máxima requerida por el dispositivo, modifique la frecuencia del variador e inténtelo nuevamente hasta que la velocidad medida sea mayor que la velocidad máxima requerida por el dispositivo. Supongamos que la velocidad medida es 504 cuando la frecuencia del variador es 64000.
Luego detente, completa los cuatro números de la izquierda, la velocidad máxima es 504, la frecuencia máxima correspondiente es 64.000, la velocidad mínima es 0,05 (0,05 es 504 dividido por 10000), la frecuencia mínima correspondiente es 6 ( 6 es 64.000 dividido por 10.000). La relación de velocidad se calcula en 1:10.000.
Haga clic en "Calibración del sensor de fuerza" en la Figura 7, que se muestra como se muestra en la Figura 10:

En la Figura 10, prepare el dinamómetro estándar, complete cada punto de fuerza de acuerdo con el rango de medición del sensor de fuerza primero, suponiendo que el rango de medición del sensor es 500 N, luego los puntos de fuerza pueden ser 10,20,50,100,200,500 , debe asegurarse de que las fuerzas estén dispuestas en potencia ascendente, y la sexta fuerza es el rango de medición del sensor. Cuando el sensor no esté estresado, haga clic en
En la Figura 7, haga clic en "Calibrar otros sensores de fuerza" para mostrar como se muestra en la Figura 11:

La máquina puede admitir otros 3 sensores de fuerza en forma intercambiable y el método de calibración es similar al primer sensor de fuerza, por lo que no se describirá nuevamente.
Haga clic en "Ayuda" en la Figura 5 y se mostrará la pantalla de ayuda, principalmente la definición de cada conexión.
Seleccione un método de prueba en la Figura 2 y haga clic en "Establecer" para ingresar a la página de configuración de parámetros del método de prueba.
Estos parámetros se denominan parámetros de configuración y los parámetros descritos en la calibración anterior se denominan parámetros de calibración.
Los parámetros de calibración los establece la fábrica para determinar la precisión del instrumento y el usuario no puede modificarlos a voluntad, por lo que está protegido con contraseña. Los parámetros de configuración pueden ser modificados por el usuario según el uso. Estos parámetros no afectan la precisión del dispositivo. No se requiere contraseña.
A continuación se toma la prueba de tracción como ejemplo. Los parámetros de configuración del ensayo de tracción se muestran en la Figura 12 a la Figura 19

Figura 12
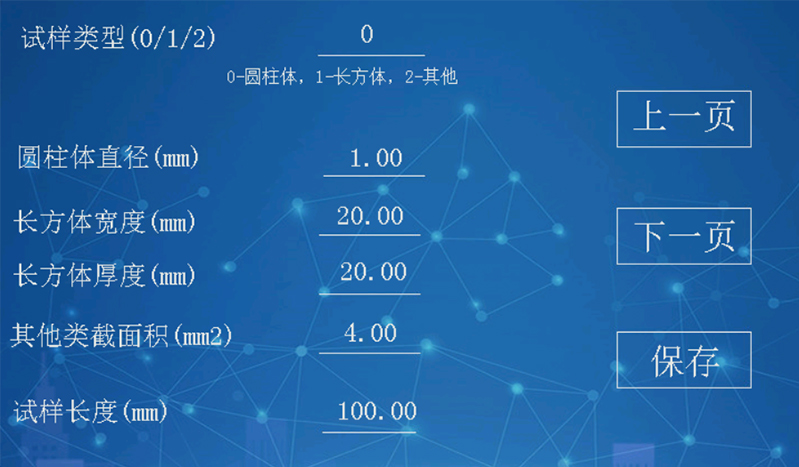
Figura 13
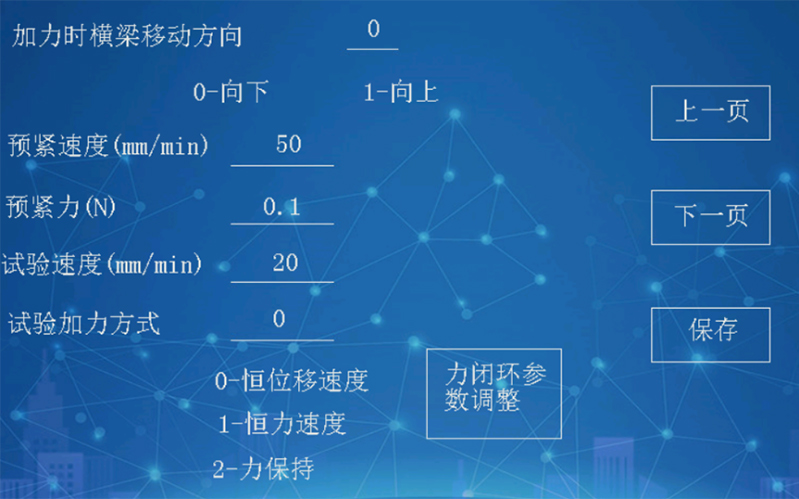
Figura 14
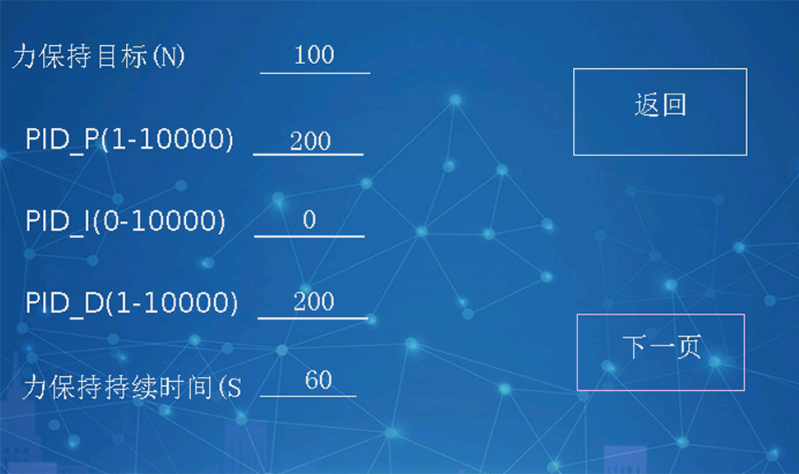
Figura 15
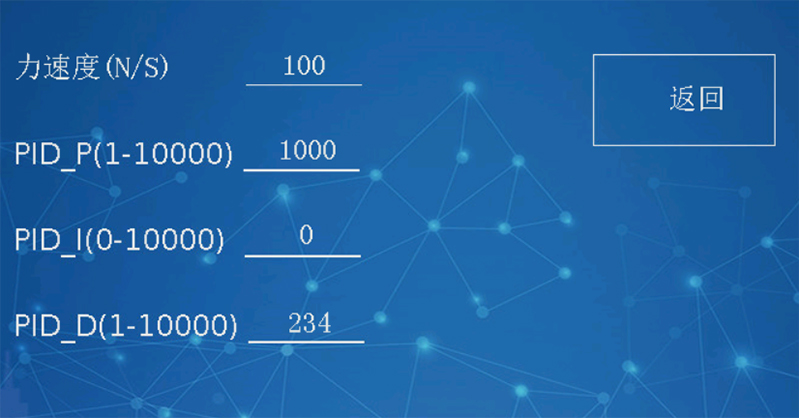
Figura 16
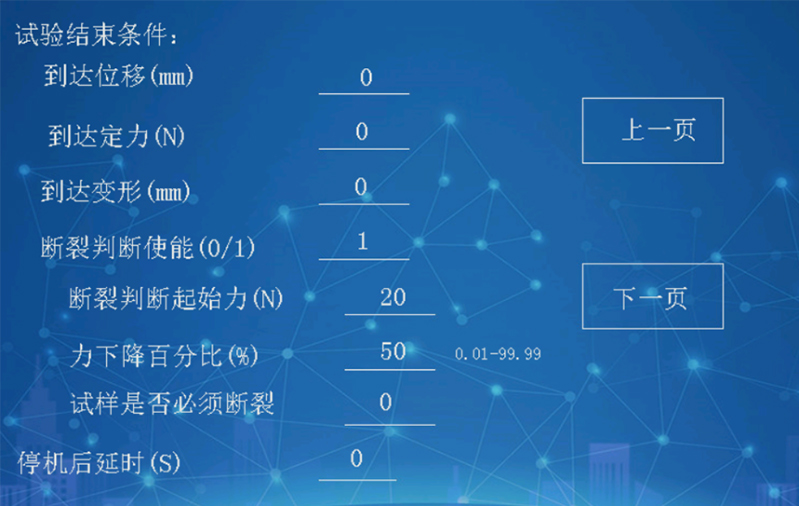
Figura 17
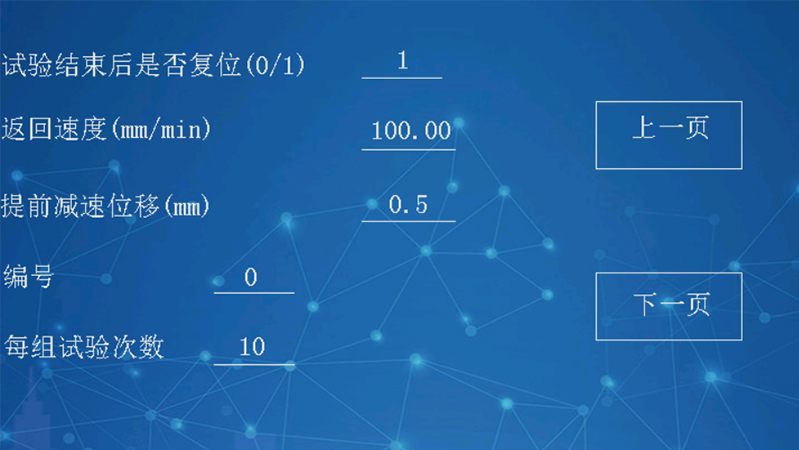
Figura 18
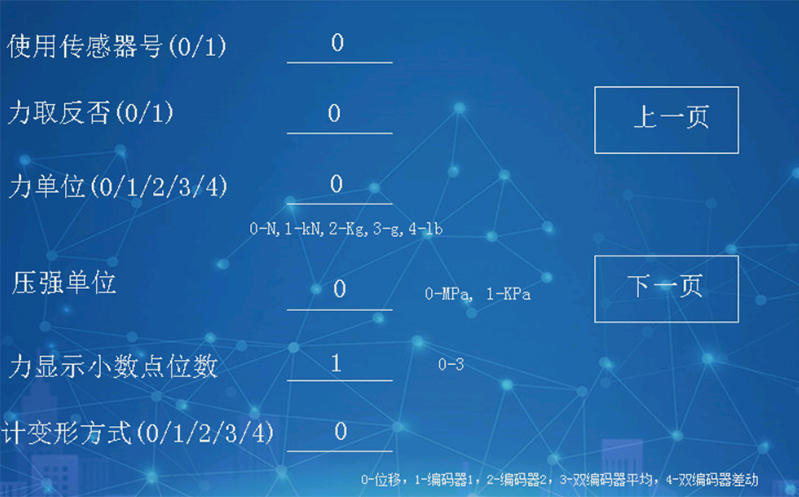
Figura 19
De la Figura 12 a la Figura 19 se configuran los parámetros, los cuales se describen a continuación:
El tipo de muestra se divide en tres tipos. Si el tipo de muestra es 0, el parámetro de diámetro es válido y el sistema calculará automáticamente el área de la sección transversal según el diámetro
Si el tipo de muestra es 1, los parámetros de ancho y espesor son válidos y el sistema calculará automáticamente el área de la sección transversal según el ancho y el espesor.
Si el tipo de muestra es 2, el área de sección transversal de otros tipos es válida.
La fuerza dividida por el área de la sección transversal es igual a la fuerza. El área de la sección transversal es correcta y la resistencia es correcta.
La longitud de la muestra se utiliza para calcular el alargamiento.
Los puntos bajo y alto del segmento elástico se utilizan para calcular el módulo elástico (ver GB/T228-2010). Los dos tamaños específicos de valor están relacionados con la muestra. En general, el punto bajo debe establecerse en aproximadamente el 15 % de la fuerza máxima y el punto alto debe establecerse en aproximadamente el 30 % de la fuerza máxima, por lo que el valor de la fuerza máxima debe estimarse antes de la prueba. Establezca estos dos puntos según la fuerza máxima estimada. (El software de computadora puede registrar todo el proceso de prueba, no es necesario realizar estimaciones)
Dirección de movimiento posterior 0-abajo, 1-arriba
Velocidad de desplazamiento inicial, si el método de aplicación de fuerza es una velocidad de desplazamiento constante, entonces aquí está la velocidad de prueba.
Si la fuerza de pretensión se establece en 50 N, significa que la muestra se vuelve recta cuando la fuerza es de 50 N y el punto inicial para calcular la deformación es 0,1 N de forma predeterminada
Modo de fuerza: velocidad de desplazamiento constante, motor paso a paso y servomotor de CA pueden proporcionar el modo de fuerza predeterminado.
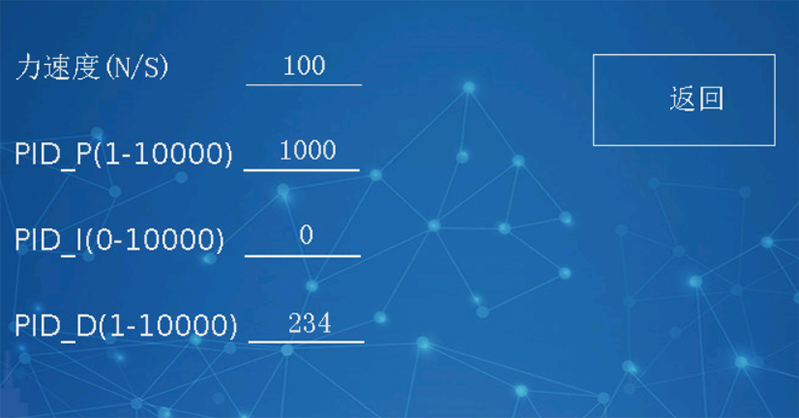
Velocidad de fuerza constante, de esta manera se requiere el uso de retroalimentación de fuerza, también conocido como algoritmo de fuerza de bucle cerrado, hay una variedad de algoritmos de fuerza de bucle cerrado, aquí está el uso del algoritmo PID, es necesario configurar los parámetros PID por adelantado. El proceso de configurar los parámetros PID apropiados se denomina ajuste de parámetros PID.
Haga clic en [Forzar ajuste del parámetro de bucle cerrado] en la Figura 14 para mostrar la Figura 20
El mantenimiento de fuerza constante también utiliza el algoritmo PID, como se muestra en la Figura 21
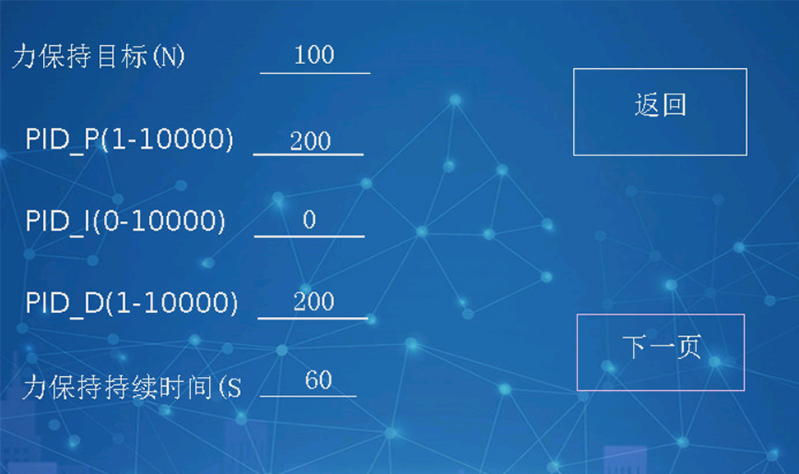
Nota: En la prueba de tracción, el método de retención de fuerza constante no funciona, sólo en la prueba de retención de fuerza.
7. Precauciones
7.1 Antes de iniciar el sistema por primera vez, verifique la precisión de los cables y la fuente de alimentación de entrada. La fuente de alimentación es de 220V±50Hz y está debidamente conectada a tierra.
7.2 Antes de la prueba, configure los parámetros de prueba correctamente para garantizar la precisión de los datos de la prueba.
7.3 Durante la prueba, realice la prueba según el método correcto.
8. Fallos comunes y solución de problemas
| Por lo tanto, la apariencia está bloqueada | Causa y tratamiento |
| No se muestra ninguna pantalla después de encender el dispositivo | Cable de alimentación del controlador, seguridad, interruptor, etc. |
| Iniciar ninguna acción | Fuente de alimentación del host, seguridad, interruptor, cable de control |
| Después de la carga, no se muestra la fuerza de prueba | El sensor está conectado correctamente |
| Estabilidad de la fuerza | Revisar los cables de tierra del sistema |
| Alarma de sonido largo | El sensor está sobrecargado o la línea del sensor está rota |
 Máquina de prueba de resistencia de unión adhesiva
Máquina de prueba de resistencia de unión adhesiva
 Máquina de prueba de resistencia al corte adhesivo
Máquina de prueba de resistencia al corte adhesivo
 Máquina de prueba de resistencia al decapado adhesivo
Máquina de prueba de resistencia al decapado adhesivo
 Máquina de prueba de resistencia de película de aceite lubricante
Máquina de prueba de resistencia de película de aceite lubricante
 Probador de fricción de cuatro bolas
Probador de fricción de cuatro bolas
 Máquina de prueba de fricción alternativa de material dental
Máquina de prueba de fricción alternativa de material dental






















