






El sistema de prueba dinámico y estático de la serie ND3500 es un producto de serie de torsión desarrollado sobre la base de serie DT1000 original.
1. Introducción del producto
El sistema de prueba estático y dinámico de la serie ND3500 es un producto de la serie de torsión desarrollado sobre la base de la serie DT1000 original. Además de conservar la función de fatiga de tracción y compresión original, la función de fatiga de torsión recientemente agregada hace realidad el anhelado deseo de fatiga de tracción, compresión y fatiga de torsión en una sola máquina.

Esta serie de productos es adecuada para las propiedades mecánicas dinámicas y estáticas de materiales y piezas pequeñas, incluidas pruebas de fatiga de materiales y piezas de tracción, compresión, torsión y ciclos bajos y altos. La prueba mecánica de alta y baja temperatura se puede realizar con una cámara de alta y baja temperatura.
El proceso de desarrollo y desarrollo de la serie de máquinas de prueba universales estáticas y servodinámicas adopta la experiencia de desarrollo y fabricación de empresas de máquinas de pruebas servodinámicas de fama internacional, adopta el concepto de desarrollo de "unización, modularización y estandarización", absorbe el Tecnología internacional avanzada de máquinas de prueba servodinámicas y combina el uso real de los usuarios domésticos. Los componentes de soporte clave de la máquina de prueba servodinámica se seleccionan de marcas famosas de productos nacionales e internacionales similares. La estabilidad y confiabilidad del sistema han mejorado enormemente, las unidades y componentes clave del sistema se fabrican con la tecnología avanzada internacional actual y el rendimiento general de todo el sistema de prueba es equivalente al nivel técnico de la compañía de máquinas de prueba dinámicas de fama internacional. . Esta serie de productos tiene las características de fácil uso, alta precisión de control, buena confiabilidad, etc.
2. Cumplir con los criterios:
QC/T211-1996 "Método de ensayo para llantas de aleación ligera de motocicletas y ciclomotores"
GB/T22435-2008 "Llantas de aleación ligera para motocicletas y ciclomotores"
Iso 8644-2006 "Motocicletas - Llantas de aleación ligera - Métodos de ensayo"
GB/T6147-92 "Embalaje de la máquina de prueba, marcas de embalaje, requisitos técnicos de almacenamiento y transporte"
JASO T 203-85 "Llantas de aleación ligera para motocicleta"
3. Mayor ventaja:
1. Ahorro de energía (fuente de alimentación única convencional de 220 V, toda la potencia de la máquina es pequeña), protección del medio ambiente (sin aceite, sin agua y sin olor).
2. Las herramientas correspondientes pueden ser intercambiables, lo que reduce el coste de uso.
3 Operación más conveniente y flexible, más fácil de usar.
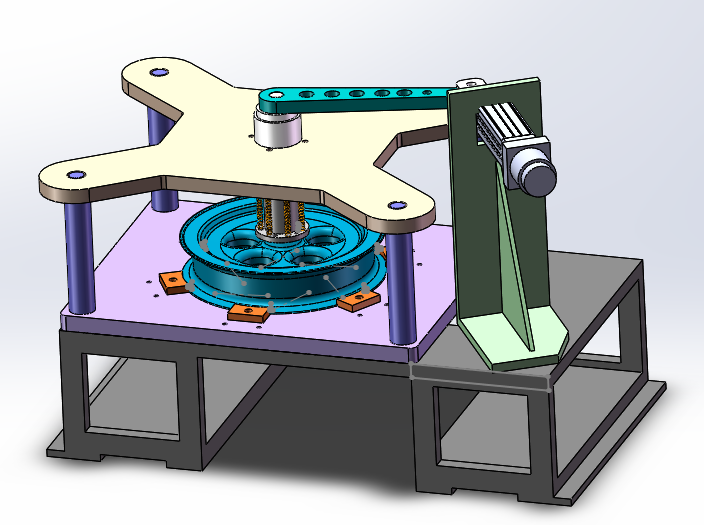
4 muestras en el proceso de prueba no están sujetas a fuerzas externas adicionales, la estructura de la estructura horizontal, el eje de salida independiente a través del manguito estriado y la conexión del cubo, para el cubo, no se aplica ninguna fuerza excepto el torque, el cubo manguito de conexión a través de la forma estriada y la conexión del eje, para garantizar que el manguito y el eje puedan deslizarse relativamente, hay suficiente fuerza para garantizar que el mecanismo tenga suficiente fuerza para impulsar el cubo. Como se muestra en la imagen;
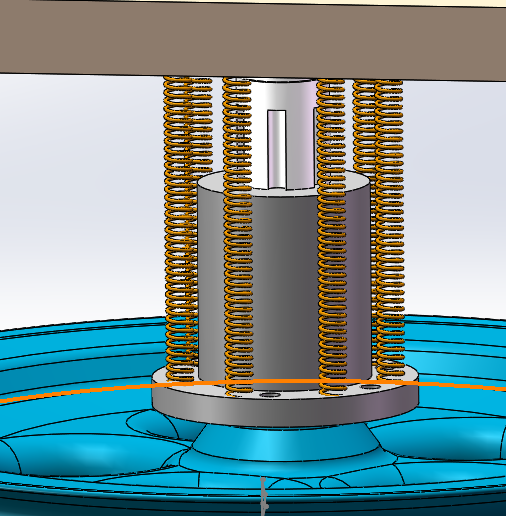
5. Instale el resorte de elevación para eliminar el exceso de fuerza ejercida sobre el cubo de la rueda por el manguito del eje debido a su propio peso.
Como se muestra a continuación: (Minimizar fuerzas externas)
4. Introducción al software:

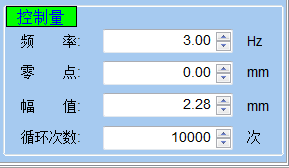
1. El software es fácil de operar: simplemente cree una nueva prueba, ingrese la cantidad de control de la prueba y haga clic en Iniciar prueba
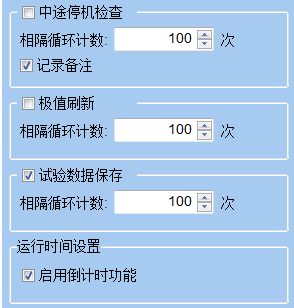
2. Con una cuenta regresiva, borre el tiempo de finalización de la prueba

3. Con la función de parada de verificación, puede configurar el número de paradas de verificación y registrar datos
5. Descripción del programa:
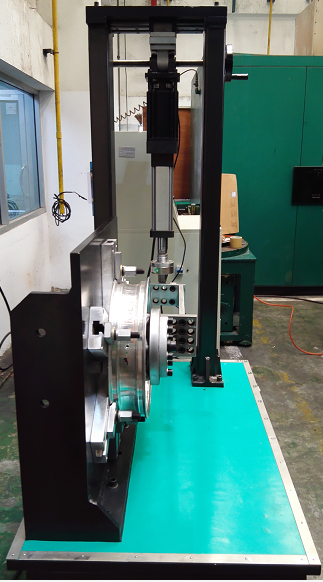
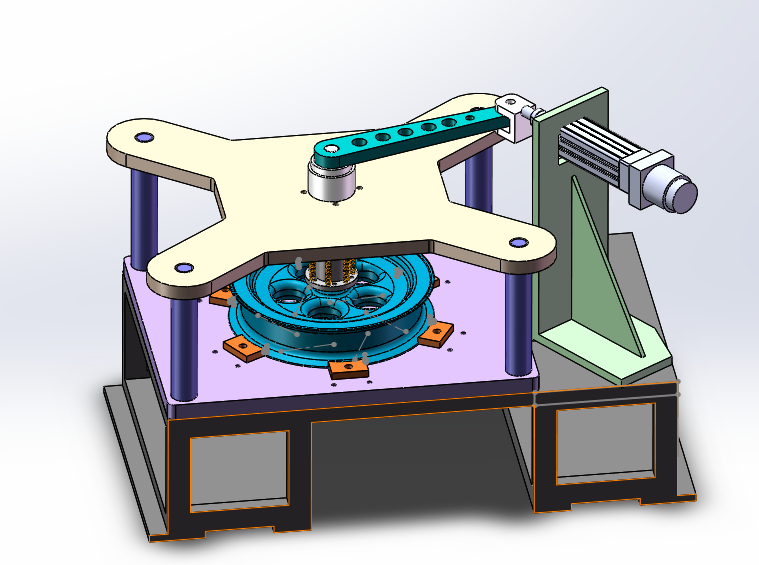
El sistema de prueba dinámico y dinámico de la serie ND3500 se compone principalmente de una máquina principal (actuador lineal servo superior), eje de posicionamiento de bloqueo, placa de presión de bloqueo, ajuste fino transversal, brazo oscilante y su módulo de accionamiento, sistema de prueba único completamente digital. Servocontrolador de canal, impresora de computadora, software de prueba relacionado, otros accesorios necesarios.
Consulte el diagrama adjunto para conocer el principio de funcionamiento y el diagrama de bloques de control
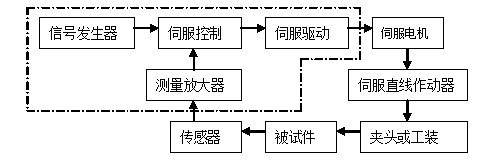
Diagrama del principio de funcionamiento del sistema
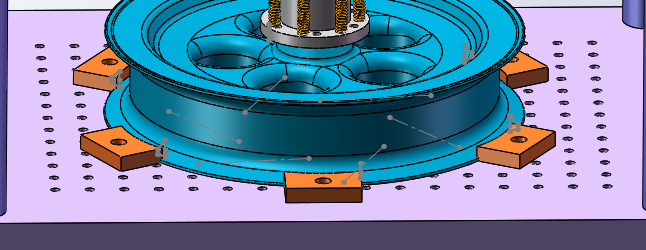
1, host: el host es una estructura de tipo marco, el servoactuador lineal se coloca dentro del marco del host. El brazo oscilante se posiciona automáticamente mediante el perno del cubo, y luego el brazo oscilante se bloquea con el cubo mediante un tornillo especial, y la superficie de contacto con el cubo se procesa mediante krulling para garantizar que no haya rotación relativa entre el brazo oscilante y el cubo durante la prueba (las herramientas correspondientes y el tamaño del eje de bloqueo serán consistentes con las herramientas originales), como se muestra en la figura:
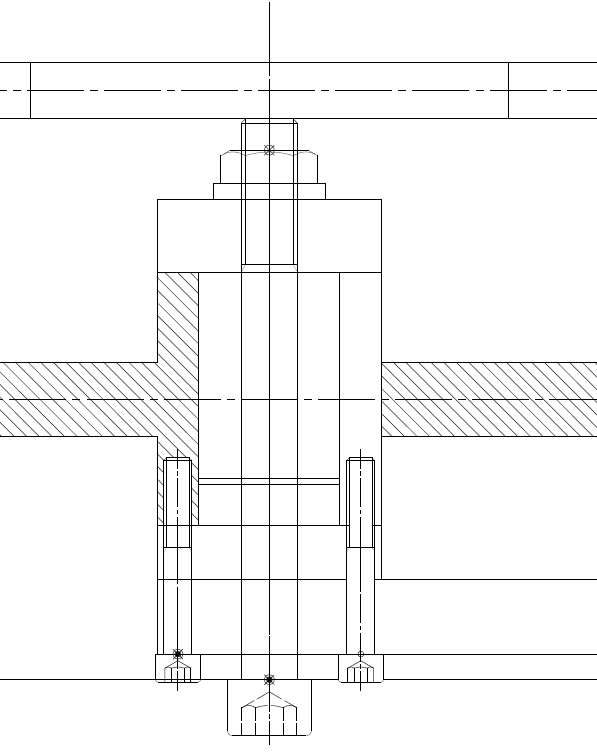
El actuador está articulado con el brazo oscilante, y el brazo oscilante está firmemente vinculado con el cubo, de modo que el movimiento lineal del actuador se convertirá en la rotación del cubo cuando esté funcionando, de modo que para lograr la función de torsión del cubo. Al sujetar el buje, la posición relativa del brazo oscilante se puede ajustar según diferentes espesores. La parte inferior del actuador está equipada con un tornillo de ajuste, que se puede ajustar de acuerdo con la posición del brazo oscilante. Asegúrese de que el actuador esté perpendicular al brazo oscilante para extender la vida útil de las piezas correspondientes. La altura superior e inferior del actuador es ajustable, lo que puede colocar el actuador en diferentes posiciones y aumentar la vida útil del actuador.
2. Utillaje: 1) Posicionamiento, como se muestra en la imagen
(Diagrama de tabla deslizante y herramientas)
La mesa porosa se utiliza para soportar la cara del extremo del cubo y la mesa deslizante está equipada con un bloque de posicionamiento de arco móvil (la posición se puede cambiar según los diferentes diámetros del cubo, el diámetro estimado del cubo se puede perforar avance, y la posición se puede ajustar cuando sea necesario reemplazarlo).
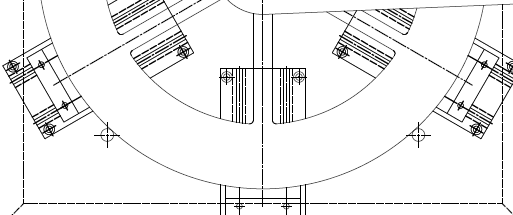
(Las ruedas de diferentes diámetros se configuran con círculos de diámetros correspondientes)
Después de fijar el cubo a la rotación, el bloque de posicionamiento se empuja hasta el borde del cubo a lo largo de las respectivas ranuras guía y se bloquea.
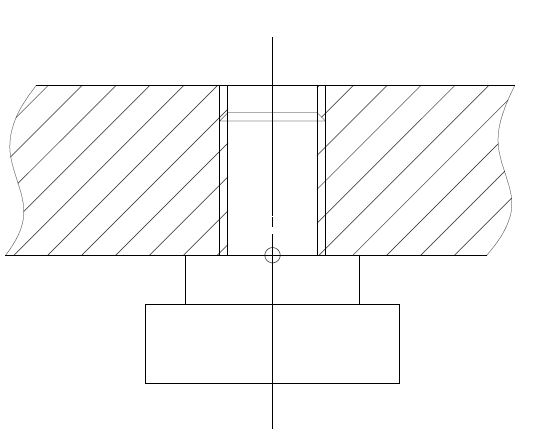
2) Bloqueo del cubo de la rueda: como se muestra en la imagen
El dispositivo de bloqueo adopta la placa de sujeción más confiable, pernos M20 con tuercas especiales para garantizar la confiabilidad y conveniencia de la prueba, el dispositivo de sujeción es común con el equipo original,
3) Además de cumplir con el ensayo de torsión, la adición de herramientas se puede extender al ensayo de fatiga por tracción del material.
6. Características del actuador

1, puede funcionar en entornos hostiles, impermeables, a prueba de explosiones, niebla salina, etc.
2, utilizando husillo de alta precisión y motor famoso, alta precisión de posicionamiento, respuesta rápida, carrera y velocidad ajustables.
3, este producto tiene poco ruido, ahorra energía y protege el medio ambiente, y tiene una larga vida útil.
4, este producto es de tamaño pequeño, liviano, fácil de instalar y depurar.
5, este producto está equipado con sobrecorriente, sobrecarrera y otras medidas de protección para garantizar el funcionamiento seguro del equipo.
[Principales indicadores de desempeño]
Fuerza de empuje dinámica nominal: 0-5KN
Frecuencia de acción (máx.): 15 veces/seg
Carrera nominal: 0-100 mm
La velocidad es de 0-500 mm/s
Entorno de trabajo: resistencia a altas temperaturas, a prueba de polvo, impermeable, a prueba de explosiones
Temperatura ambiente: -40 ℃ ~ 60 ℃
Humedad relativa: 80 % (20 ± 5 ℃)
Potencia del motor: 3KW(Panasonic o Fuji)
[Características funcionales]
1, aceleración rápida, tiempo de posicionamiento corto, buen rendimiento dinámico. (Precisión, precisión, rápido, estable)
2, precisión, fuerte
3, se puede utilizar en un solo eje
4, se puede utilizar para combinación de múltiples ejes
5, aplicación modular
6, estructura simple, puede ahorrar espacio de diseño mecánico
7, con una variedad de métodos de instalación y conexión y accesorios para elegir el diseño
8, se puede combinar con una variedad de motores y reguladores de control de motores
9, puede ser posicionamiento multipunto y control de múltiples secciones
10, la selección de accesorios adecuados puede mejorar la eficiencia del ensamblaje
11, para cumplir con el diseño de diferentes requisitos de precisión
12, ahorra tiempo, fácil mantenimiento
7. Servocontrolador de canal único completamente digital:
1, el número de canales de control: 1, incluyendo fuerza de prueba, desplazamiento de prueba, deformación de prueba, tres bucles de control de bucle cerrado, con modo de control, función de conmutación suave y sin perturbaciones. La frecuencia máxima de actualización de datos de control de circuito cerrado es de 2 kHz; La resolución del controlador A/D y D/A es de 14 bits. Rango de frecuencia de señal: 0,001 Hz ~ 5 Hz; Forma de onda del generador de señal: onda sinusoidal, onda triangular, etc. El controlador tiene la función de configuración de parámetros límite y función de protección completa. Además de la protección contra sobrecarga (110%) y la protección secundaria contra sobrecorriente, también tiene protección de carga dinámica arbitraria, protección de carga estática, protección de frecuencia, etc.
2, software de control de máquina (sistema) de prueba servodinámica:
Software de gestión del sistema: El software es la base de todo el servocontrolador digital, sus funciones principales son gestionar los recursos de hardware del sistema de control, definir el sensor, ajustar los parámetros de control digital, configurar la protección, muestra el modo de control actual, el estado del generador hidráulico y de funciones y la calibración del sensor. Se proporcionan un osciloscopio digital de doble traza, un amperímetro de servoválvula digital y seis voltímetros digitales para la visualización en tiempo real de los datos de prueba. Software generador de funciones: el software se utiliza principalmente para pruebas dinámicas de amplitud constante, como la prueba de fatiga de amplitud constante. El software del generador de funciones rastreará y corregirá automáticamente los valores de pico y valle de la cantidad de control (como la carga) para garantizar que el valor de error dinámico típico de cada pico sea ±1%FS durante todo el proceso de prueba. Durante la prueba, el operador puede cambiar dinámicamente el pico, el valle y la frecuencia, y también puede realizar retención de señal manual o automática. Si se establece el intervalo de ciclo de retención de señal automática, cada vez que el número de ciclos de prueba aumenta en un intervalo de ciclo, el software mantendrá automáticamente la señal en un nivel establecido para facilitar la medición de algunos datos de prueba (como la longitud visual de la grieta). . Las formas de onda opcionales del software son onda sinusoidal, onda triangular, onda oblicua, onda en diente de sierra, onda combinada y prueba de onda oblicua combinada. Al final de la prueba, el software guardará algunos datos importantes, como la carga de prueba, la frecuencia, el número de ciclos y el tiempo de prueba. El software también puede realizar pruebas estáticas simples. Software de prueba multifuncional: el software es un software de prueba flexible y completamente funcional; los usuarios pueden usarlo para diseñar métodos de prueba especiales, pero no necesitan programación. Este software tiene una variedad de funciones de control, funciones de adquisición de datos y otras funciones auxiliares del servocontrolador que se realizan en un panel en forma de ICONOS, los usuarios pueden arrastrar y soltar estos ICONOS de funciones en el panel de definición de prueba con el mouse y combinarlos. según las necesidades del usuario a voluntad, puede realizar pruebas de acuerdo con los métodos de prueba definidos por el usuario. El software se puede utilizar para pruebas de espectro aleatorio.
3, parámetros técnicos del controlador:
3.1 Unidad de acondicionamiento de señal general totalmente digital: prueba de fuerza, desplazamiento, ángulo de tres circuitos de control de bucle cerrado. Tiene modo de control función de conmutación suave sin perturbaciones.
3.2 La frecuencia máxima de actualización de datos de control de circuito cerrado es de 5Hz.
3.3 La resolución del controlador A/D y D/A es de 16 bits.
3.4 Rango de frecuencia de la señal: 0,01Hz ~ 10Hz.
3.5 Forma de onda del generador de señales: onda sinusoidal, onda triangular, onda de programa.
3.6 Precisión del control: la precisión del control estático es del 0,5 % FS y la precisión del control dinámico típica es del 1 % FS.
3.11 Función de configuración de parámetros de límite.
8. Otra configuración y accesorios necesarios:
1 útil de fijación correspondiente
2 Tornillo de repuesto
3 Copia de seguridad de datos óptica
4 Configuración de fijaciones de torsión;
9. Principales indicadores de desempeño técnico:
1. Par máximo: 3500 NM
2, la amplitud máxima del actuador: ±50 mm, lo que indica una precisión de ±0,5 %FS.
3, rango de frecuencia: 0,1-5 Hz (la frecuencia más alta corresponde a la amplitud máxima ±1)
4, la velocidad máxima de línea 500 mm/s
5, modo de control: carga, desplazamiento, modo de control de deformación, la forma de onda de prueba principal: compatible con el controlador (incluyendo onda sinusoidal, onda triangular, onda oblicua y forma de onda de entrada externa);
6, el software cero muestra la curva de histéresis completa.
7. Espacio máximo de prueba: 450 mm (incluido el portabrocas).
8. Distancia entre columnas: 450mm. (por confirmar)
9, diámetro de rueda medido: 10-24 pulgadas, ancho de rueda de 8 pulgadas
10, brazo de fuerza de prueba: 700±1 mm
11. Peso de la máquina: ≈1500 kg
10. Lista de configuración del sistema: Ver tabla adjunta
| Nombre del artículo | Cantidad | Origen/marca | ||
| 1 | Anfitrión | marco (incluyendo columna, viga, banco de trabajo, etc.) | 1 | hecho a sí mismo |
| Servoactuador lineal | 1 | hecho a sí mismo | ||
| Servosistema | 1 | doméstico | ||
| Sensor de carga | 1 | Perno mundial americano | ||
| Servidor y motor | 1 | Panasonic Japón | ||
| Accesorio de fijación del cubo | 1 | hecho a sí mismo | ||
| Bloque de abrazadera de bloqueo | 6 | hecho a sí mismo | ||
| 2 | Servocontrolador completamente digital | 1 | doméstico | |
| 3 | Pruebe el paquete de software de la aplicación | 1 | hecho a sí mismo | |
| 4 | Computadora | 1 | HP | |
| 5 | Impresora A4 | 1 | HP | |
| 6 | Cables de señal y cables de conexión | 1 | hecho a sí mismo | |
 Probador de carga de seguridad del cinturón de seguridad con bloqueo del esparcidor
Probador de carga de seguridad del cinturón de seguridad con bloqueo del esparcidor
 Máquina de prueba estática de tracción y torsión para cuchillas de flujo pasante
Máquina de prueba estática de tracción y torsión para cuchillas de flujo pasante
 Máquina de prueba de torsión de alambre metálico EZ-5
Máquina de prueba de torsión de alambre metálico EZ-5
 Máquina de prueba de fatiga de torsión del cubo de rueda
Máquina de prueba de fatiga de torsión del cubo de rueda
 Máquina de prueba de impacto radial de cubo
Máquina de prueba de impacto radial de cubo
 Máquina de prueba de fatiga de carga radial del cubo de rueda
Máquina de prueba de fatiga de carga radial del cubo de rueda









